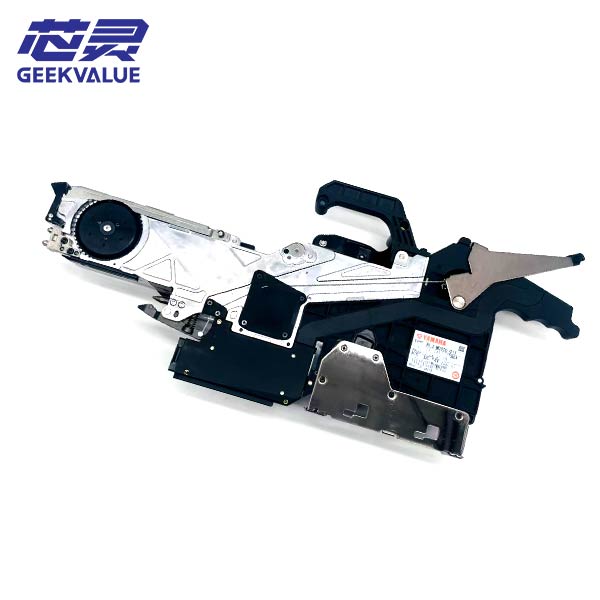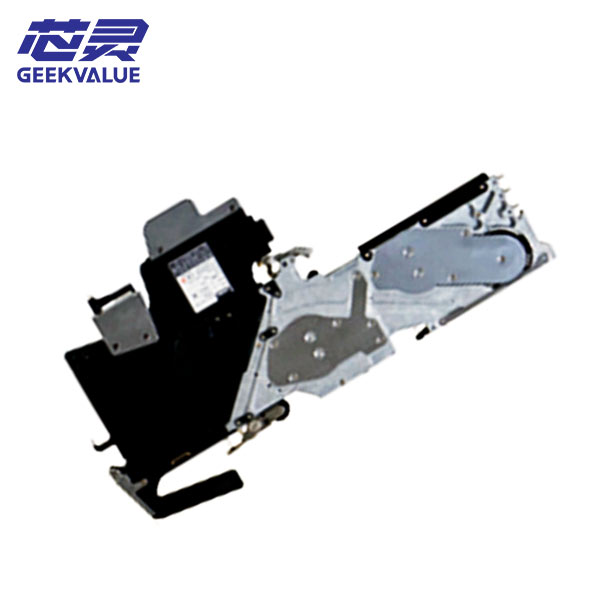
Mae'r Siemens SIPLACE Feeder Hover Davis 44MM yn borthwr UDRh blaengar sydd wedi'i gynllunio ar gyfer cydosod PCB cyflym, manwl uchel. Fel elfen hanfodol o system codi a gosod Siemens SIPLACE, mae'r peiriant bwydo hwn yn sicrhau lleoliad cydrannau llyfn, effeithlon a dibynadwy, gan leihau amser segur a sicrhau'r effeithlonrwydd cynhyrchu mwyaf posibl.
")
Siemens SIPLACE Feeder Hofran Davis 44MM Nodweddion Allweddol
Bwydo Cyflymder Uchel: Wedi'i optimeiddio ar gyfer cyflwyno cydrannau'n gyflym, gan leihau amseroedd beicio mewn llinellau cydosod awtomataidd.
Peirianneg Fanwl: Mae'n sicrhau lleoliad cydran cywir heb fawr o wyriad, gan wella ansawdd y cynnyrch.
Gwydnwch Cadarn: Wedi'i weithgynhyrchu â deunyddiau gradd ddiwydiannol, gan sicrhau dibynadwyedd hirdymor a pherfformiad cyson.
Gweithrediad sy'n Gyfeillgar i Ddefnyddwyr: Gosodiad hawdd a newid cyflym ar gyfer llif gwaith cynhyrchu di-dor.
Cydnawsedd Eang: Wedi'i gynllunio i integreiddio'n ddi-ffael â pheiriannau codi a gosod Siemens SIPLACE.
Pam dewis y peiriant bwydo 44MM Hover Davis?
Effeithlonrwydd Cynhyrchu Gwell: Yn lleihau tagfeydd ac yn symleiddio cydosod PCB.
Costau Cynnal a Chadw Is: Wedi'i adeiladu ar gyfer gwydnwch, sy'n gofyn am wasanaethu llai aml.
Perfformiad Cyson: Yn cynnal cywirdeb bwydo sefydlog ar gyfer gweithgynhyrchu electronig o ansawdd uchel.
Brand Dibynadwy: Mae Hover Davis yn enwog am ei atebion awtomeiddio UDRh wedi'u peiriannu'n fanwl gywir.
Ceisiadau
Defnyddir Hover Davis 44MM Feeder Siemens SIPLACE yn eang mewn diwydiannau fel:
Electroneg Defnyddwyr: Ffonau clyfar, tabledi, a dyfeisiau cartref craff.
Electroneg Modurol: PCBs manwl uchel ar gyfer unedau rheoli cerbydau a systemau infotainment.
Dyfeisiau Meddygol: Cynulliad PCB dibynadwy ar gyfer electroneg gradd feddygol.
Awtomeiddio Diwydiannol: Byrddau cylched cymhleth ar gyfer systemau awtomataidd a roboteg.
Ble i Brynu
Chwilio am gyflenwr dibynadwy o Siemens SIPLACE Feeder Hover Davis 44MM? Mae ein cwmni'n cynnig prisiau cystadleuol, cynhyrchion dilys, a chefnogaeth arbenigol i sicrhau bod eich cynhyrchiad UDRh yn rhedeg yn esmwyth. Cysylltwch â ni heddiw i gael dyfynbris am ddim neu i drafod eich gofynion penodol!