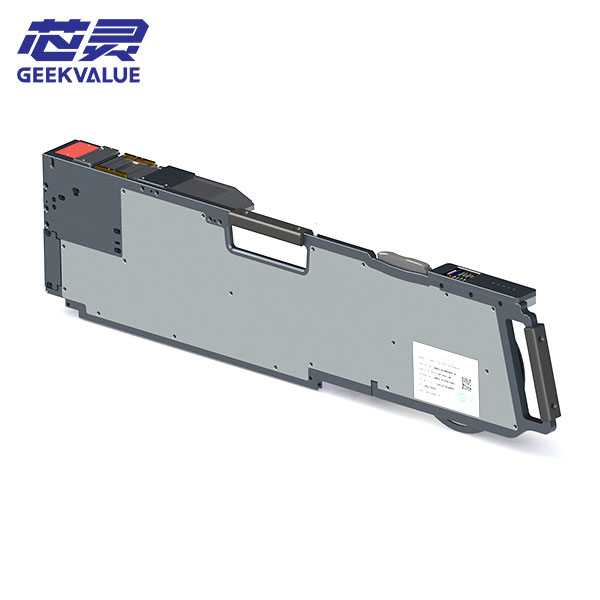
عملکردهای اصلی برد کنترل دستگاه جایابی JUKI شامل جنبه های زیر است:
کنترل موتور: برد کنترل وظیفه کنترل سروو موتور و استپر موتور را بر عهده دارد
مدیریت موقعیت: شمارنده هایی برای مدیریت موقعیت محور XY، محور ZQ و محور R موتور پشتیبان نصب شده است.
اتصال سیگنال: به عنوان یک بستر اتصال SYNONET، سیگنال های درایور محور ZY4 و بستر XMP، از جمله سیگنال خروجی سیگنال هشدار توسط پروب تصویر را منتقل می کند.
تشخیص ایمنی: بستر SAFETY سوئیچ اضطراری، سنسور حد، سنسور X-SLOW را شناسایی می کند و در صورت لزوم منبع تغذیه سروو را قطع می کند. در همان زمان، سوئیچ محافظ و سنسور X-SLO را شناسایی کرده و به بستر XMP اطلاع می دهد.
این عملکردها در کنار هم عملکرد پایدار و تولید کارآمد دستگاه جاگذاری JUKI را تضمین می کنند.