Prinsip kerja penyuap mendatar SMT terutamanya merangkumi langkah-langkah berikut:
Pemuatan komponen: Pertama, komponen elektronik dimuatkan ke dalam penyuap (feeder) dalam susunan tertentu. Ini biasanya melibatkan penetapan komponen pada pita, yang kemudiannya dipasang pada aci penyuap.
Sambungan peralatan: Penyumpan disambungkan ke mesin penempatan untuk memastikan penyegerakan penghantaran isyarat dan pergerakan mekanikal.
Pengenalpastian dan kedudukan komponen: Penyumpan mengenal pasti jenis, saiz, arah pin dan maklumat lain komponen melalui penderia atau kamera dalaman. Maklumat ini penting untuk penempatan tepat seterusnya.
Pemilihan komponen: Kepala peletakan bergerak ke kedudukan penyuap yang ditentukan mengikut arahan sistem kawalan dan mengambil komponen. Semasa proses memilih, adalah perlu untuk memastikan bahawa arah pin dan kedudukan komponen adalah tepat.
Peletakan komponen: Selepas mengambil komponen, kepala peletakan bergerak ke kedudukan PCB yang ditentukan, meletakkan komponen pada pad PCB, dan memastikan bahawa pin komponen diselaraskan dengan pad.
Tetapkan semula dan kitaran: Selepas melengkapkan peletakan komponen, penyuap akan menetapkan semula secara automatik kepada keadaan awal dan bersedia untuk pengambilan komponen seterusnya. Keseluruhan proses dikitar di bawah arahan sistem kawalan sehingga semua tugas penempatan komponen selesai.
Mod pemanduan dan klasifikasi
Pengumpan boleh dibahagikan kepada pemacu elektrik, pemacu pneumatik dan pemacu mekanikal mengikut mod pemanduan yang berbeza. Antaranya, pemacu elektrik mempunyai getaran kecil, hingar rendah dan ketepatan kawalan yang tinggi, jadi ia lebih biasa dalam mesin peletakan mewah.
Parameter teknikal adalah seperti berikut
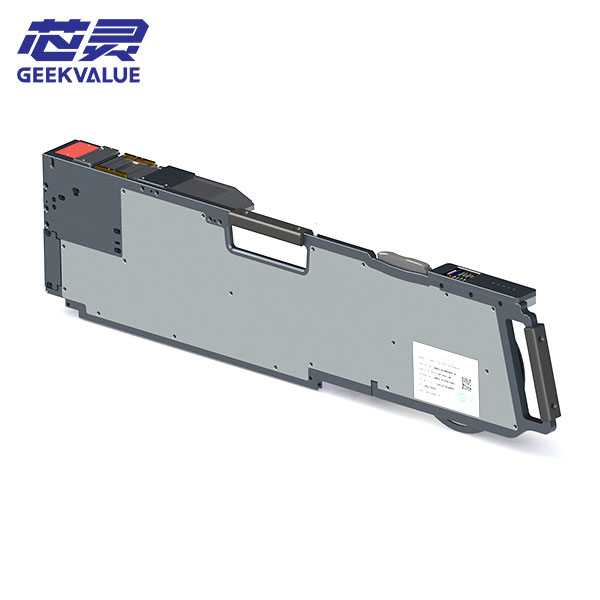
Model DK-AAD2208
Dimensi (panjang*lebar*tinggi, unit: mm) 570*127*150mm
Berat 14KG
Voltan kerja DC 24V
Arus maksimum 3A
Kelajuan penyusuan 2.5-3 s/Pcs
Mod pemacu Elektrik tulen
Panel pengendalian Skrin warna TFT 0.96 inci, 80*160 piksel
Ralat mengangkat bahan ±0.4mm
Lebar pita berkenaan 63-90MM
")