SMT 水平フィーダーの動作原理は、主に次の手順で構成されます。
部品のロード: まず、電子部品が特定の配置でフィーダー (フィーダー) にロードされます。通常、この作業では部品をテープ上に固定し、テープをフィーダーのシャフトに取り付けます。
機器の接続: フィーダーは配置機に接続され、信号伝送と機械動作の同期が確保されます。
コンポーネントの識別と配置: フィーダーは、内部センサーまたはカメラを使用して、コンポーネントの種類、サイズ、ピンの方向などの情報を識別します。この情報は、その後の正確な配置に不可欠です。
部品ピッキング:配置ヘッドは制御システムの指示に従ってフィーダーの指定された位置に移動し、部品をピックアップします。ピッキングプロセス中は、部品のピンの方向と位置が正確であることを確認する必要があります。
部品配置: 部品をピックアップした後、配置ヘッドは PCB の指定された位置に移動し、部品を PCB のパッドの上に配置して、部品のピンがパッドに揃っていることを確認します。
リセットとサイクル: 部品の配置が完了すると、フィーダーは自動的に初期状態にリセットされ、次の部品のピックアップの準備をします。すべての部品配置タスクが完了するまで、プロセス全体が制御システムのコマンドに従ってサイクルされます。
運転モードと分類
フィーダーは、駆動方式の違いにより、電動駆動、空気圧駆動、機械駆動に分けられます。その中でも、電動駆動は振動が小さく、騒音が低く、制御精度が高いため、ハイエンドの実装機でよく使用されます。
技術的なパラメータは次のとおりです
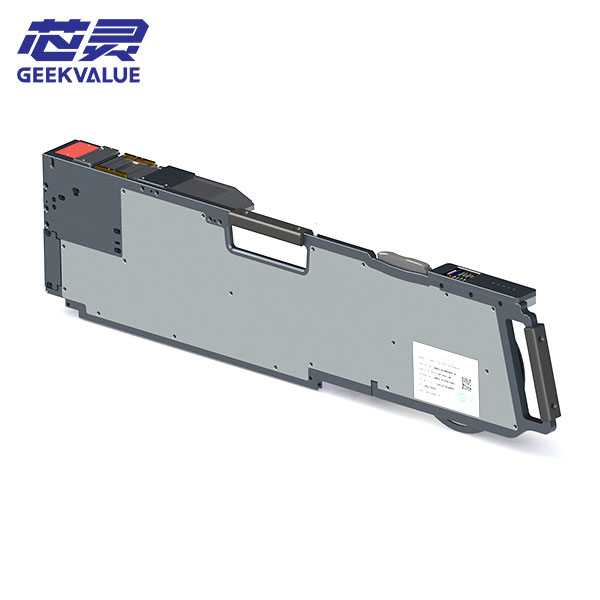
モデルDK-AAD2208
寸法(長さ×幅×高さ、単位:mm)570×127×150mm
重量 14KG
動作電圧 DC 24V
最大電流3A
供給速度 2.5~3秒/個
ドライブモード 純電気
操作パネル 0.96インチTFTカラー画面、80×160ピクセル
材料持ち上げ誤差 ±0.4mm
適用テープ幅63-90MM
")