एसेंबलीऑन एसएमटी मशीन की मोटर एसएमटी मशीन में एक महत्वपूर्ण भूमिका निभाती है, जिसे मुख्य रूप से रैखिक मोटर्स और सर्वो मोटर्स में विभाजित किया जाता है।
रैखिक मोटर्स
रैखिक मोटर का उपयोग मुख्य रूप से एस्बियन एसएमटी मशीन में नोजल के उठाने और घुमाव को नियंत्रित करने के लिए किया जाता है। यह सर्वो के माध्यम से सीधे रोटेशन को नियंत्रित करता है, और इंटरफ़ेस जहां माउंटिंग हेड नोजल से जुड़ता है, स्थायी चुंबक से सुसज्जित होता है, और वैक्यूम और वायु दबाव को वायु दबाव द्वारा नियंत्रित किया जाता है। यह डिज़ाइन माउंटिंग प्रक्रिया को अधिक सटीक और कुशल बनाता है।
सर्वो मोटर्स
सर्वो मोटर का उपयोग एक्स दिशा में माउंटिंग मॉड्यूल की गति को चलाने के लिए किया जाता है। एस्बियन एसएमटी मशीन एक्स दिशा में गति को अधिक स्थिर और तेज़ बनाने के लिए रैखिक गाइड चुंबकीय उत्तोलन तकनीक का उपयोग करती है। सर्वो मोटर का सटीक नियंत्रण माउंटिंग प्रक्रिया के दौरान उच्च परिशुद्धता और स्थिरता सुनिश्चित करता है।
एसएमटी मशीन की समग्र संरचना
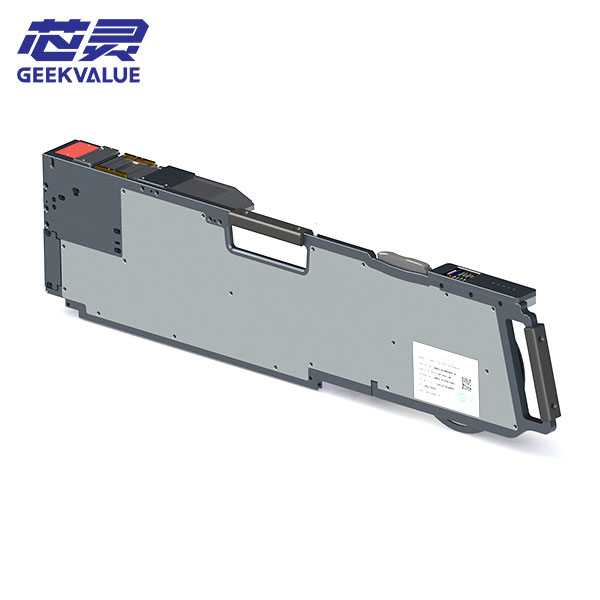
एस्बियन एसएमटी मशीन की समग्र संरचना में रैक, माउंटिंग मॉड्यूल, गाइड रेल ट्रांसमिशन और अन्य भाग शामिल हैं। रैक का उपयोग सभी नियंत्रकों और सर्किट बोर्डों को ठीक करने और स्थिर समर्थन प्रदान करने के लिए किया जाता है। माउंटिंग मॉड्यूल को एक मानक माउंटिंग मॉड्यूल और एक संकीर्ण माउंटिंग मॉड्यूल में विभाजित किया गया है। प्रत्येक मॉड्यूल में माउंटिंग की लचीलापन और सटीकता सुनिश्चित करने के लिए चार आंदोलन दिशाएँ हैं।
चिप प्लेसमेंट मशीनों के अनुप्रयोग परिदृश्य और प्रदर्शन पैरामीटर
असेंबलीऑन चिप प्लेसमेंट मशीनों में उच्च आउटपुट, उच्च लचीलापन और उच्च परिशुद्धता की विशेषताएं हैं, और ये विभिन्न इलेक्ट्रॉनिक घटकों की प्लेसमेंट आवश्यकताओं के लिए उपयुक्त हैं। वे 01005 से लेकर 45x45 मिमी फाइन पिच QFP, BGA, μBGA और CSP पैकेज तक के घटकों को संभाल सकते हैं, जिनकी प्लेसमेंट सटीकता 40 माइक्रोन @ 3sigma और प्लेसमेंट बल 1.5N जितना कम है।