Prinsip kerja pengumpan horizontal SMT terutama mencakup langkah-langkah berikut:
Pemuatan komponen: Pertama, komponen elektronik dimuat ke dalam pengumpan (feeder) dalam pengaturan tertentu. Ini biasanya melibatkan pemasangan komponen pada pita, yang kemudian dipasang pada poros pengumpan.
Sambungan peralatan: Pengumpan dihubungkan ke mesin penempatan untuk memastikan sinkronisasi transmisi sinyal dan pergerakan mekanis.
Identifikasi dan penempatan komponen: Pengumpan mengidentifikasi jenis, ukuran, arah pin, dan informasi lain dari komponen melalui sensor internal atau kamera. Informasi ini penting untuk penempatan yang tepat selanjutnya.
Pengambilan komponen: Kepala penempatan bergerak ke posisi pengumpan yang ditentukan sesuai dengan instruksi sistem kontrol dan mengambil komponen. Selama proses pengambilan, perlu dipastikan bahwa arah pin dan posisi komponen akurat.
Penempatan komponen: Setelah mengambil komponen, kepala penempatan bergerak ke posisi PCB yang ditentukan, menempatkan komponen pada bantalan PCB, dan memastikan bahwa pin komponen sejajar dengan bantalan.
Reset dan siklus: Setelah menyelesaikan penempatan komponen, pengumpan akan secara otomatis mereset ke kondisi awal dan bersiap untuk pengambilan komponen berikutnya. Seluruh proses diulang di bawah perintah sistem kontrol hingga semua tugas penempatan komponen selesai.
Mode mengemudi dan klasifikasi
Pengumpan dapat dibagi menjadi penggerak listrik, penggerak pneumatik, dan penggerak mekanis menurut berbagai mode penggerak. Di antara semuanya, penggerak listrik memiliki getaran kecil, kebisingan rendah, dan akurasi kontrol tinggi, sehingga lebih umum digunakan pada mesin penempatan kelas atas.
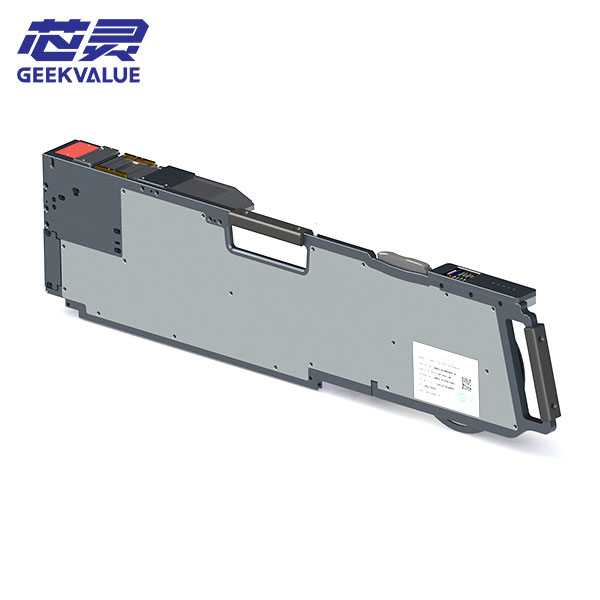
Parameter teknisnya adalah sebagai berikut
Model DK-AAD2208
Dimensi (panjang*lebar*tinggi, satuan: mm) 570*127*150mm
Berat 14KG
Tegangan kerja DC 24V
Arus maksimum 3A
Kecepatan makan 2,5-3 s/Pcs
Mode berkendara Listrik murni
Panel operasi Layar warna TFT 0,96 inci, 80*160 piksel
Kesalahan pengangkatan material ±0,4mm
Lebar pita yang berlaku 63-90MM
")