
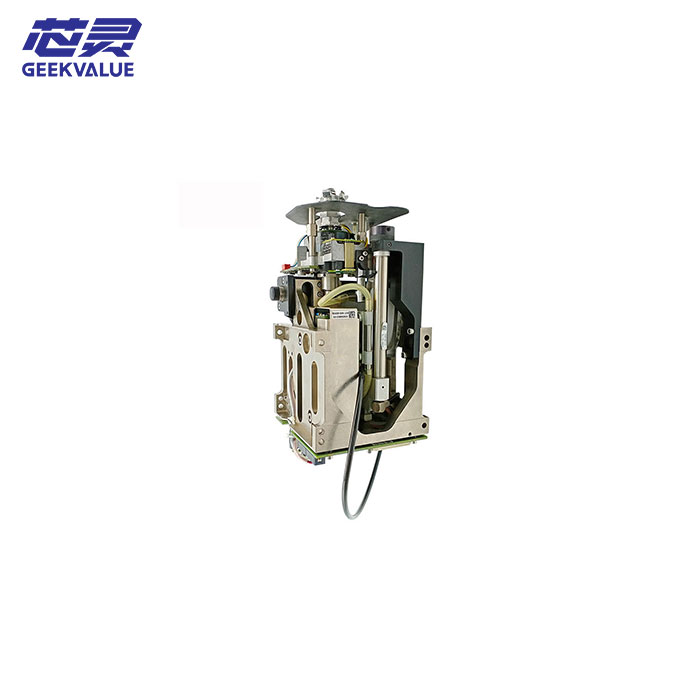
עקרון עבודה
עקרון העבודה של ראש ההשמה של TH כולל את השלבים הבאים:
רכיבי איסוף: ראש המיקום של TH משתמש בזרבובית ואקום כדי להרים שני רכיבים.
מרכוז אופטי: הרכיבים מרוכזים על ידי המערכת האופטית במהלך המסירה לעמדת המיקום.
סובב רכיבים: סובב את הרכיבים לזווית המיקום הנדרשת.
הצב את הרכיבים: הנח את הרכיבים במדויק על המיקום המצוין של לוח המעגלים.
תרחישים ישימים
ראשי מיקום TH מתאימים במיוחד לרכיבים מיוחדים הדורשים מיקום דיוק גבוה, כגון אלו הדורשים תפסן. עיצוב זה מאפשר לראש המיקום של TH להשלים את משימת המיקום של רכיבים מיוחדים במהירות וביעילות גבוהה.



אנחנו גם מספקים אחרי חלקי סיימנס ספרט:
| 00341780-02 | DP מוטור | 03058627-02 | CP20A DP Motor |
| 03102532-01 | CP20P DP מנוע | 03050314S03 | CPP DP Motro |
| 03072785S01 | גנרטור CP20A | 03106620S01 | גינרטור CP20P |
| 03152828S01 | גינרטור CPP | 03055438-01 | גינרטור CPP |
| 03058802-02 | גנרטור TH | 03038908S01 | מנוע ציר Z |
| 03058631-02 | מנוע ציר Z CP20A | 03061102S01 | מנוע ציר Z CP |
| 03005123S01 | מחלק CP20A | 03081381-01 | מחלק CPP |
| 03058629-01 | CP20A יחידת שליטת לוח עגול | 03115167-01 | [UNK]CPPיחידת שליטה דיסק |
| 03003426S02 | מחלקת מצלמה 23 | 03054153-04 | ה2003 Nozzle |
| 03013307-01 | 1001Nozzle | 03057850S03 | נוזל 2007 |
| 03054923-03 | נוזל 2033 | 03059921S03 | נוזל 2038 |
| 03083001S03 | חושש komponent CP20A | 03037106-01 | סנזר המרכיבים של [UNK]CPP |
| 03092400-02 | Sensor CP20P | 03133310-01 | Sensor |
| 03039099-01 | חסום מחליק CPP | 03060811-01 | לוח מסלול TSP 400 |
| 03087642-01 | TSP 420 לוח עקבות | 03055072-01 | מועצה ראשית |
| 03054790S01 | כרטיס בקרת SCS CPP | 03115454-01 | כרטיס תמונה |
| 03057377S02 | כרטיס שליטה WPC | 03037845-01 | מחזיק סיבוב CP20A |
| 03091256-01 | סקל ציוני ציר X | 03091255-02 | סקל ציוני ציר Y |
| 03092666-02 | עקוב אחר שסתום סולנויד | 03092667S03 | עקוב אחר שסתום סולנויד |
| 03059084-01 | ציר Y | 03109668-01 | HCU |
| 03052200-01 | מחשב GCU | 03059666-01 | FCU |
| 03059623-01 | FCU | 03079685-02 | RACE טבעת |
| 03002942-01 | כרטיס מגן | 03083835-01 | מוטור DP במצב חדש |

