עקרון העבודה של מזין אופקי SMT כולל בעיקר את השלבים הבאים:
טעינת רכיבים: ראשית, הרכיבים האלקטרוניים נטענים לתוך המזין (המזין) בסידור מסוים. זה בדרך כלל כרוך בתיקון הרכיבים על הסרט, אשר מותקן לאחר מכן על פיר המזין.
חיבור ציוד: המזין מחובר למכונת ההצבה כדי להבטיח סנכרון של העברת האות ותנועה מכנית.
זיהוי ומיקום רכיב: המזין מזהה את הסוג, הגודל, כיוון הסיכה ומידע אחר של הרכיב באמצעות חיישנים פנימיים או מצלמות. מידע זה חיוני למיקום מדויק לאחר מכן.
איסוף רכיבים: ראש המיקום נע למיקום המצוין של המזין בהתאם להוראות מערכת הבקרה ואוסף את הרכיב. במהלך תהליך הקטיף, יש לוודא שכיוון הסיכה ומיקום הרכיב מדויקים.
מיקום הרכיב: לאחר איסוף הרכיב, ראש המיקום נע למיקום המצוין של ה-PCB, מניח את הרכיב על המשטח של ה-PCB, ומבטיח שהפין של הרכיב מיושר עם הרפידה.
איפוס ומחזור: לאחר השלמת מיקום רכיב, המזין יתאפס אוטומטית למצב ההתחלתי ויתכונן לאיסוף הרכיב הבא. התהליך כולו עובר במחזוריות תחת פיקוד מערכת הבקרה עד להשלמת כל משימות התקנת הרכיבים.
מצב נהיגה וסיווג
ניתן לחלק את המזין להנעה חשמלית, הנעה פניאומטית והנעה מכנית לפי מצבי נהיגה שונים. ביניהם, לכונן חשמלי יש רטט קטן, רעש נמוך ודיוק שליטה גבוה, ולכן הוא נפוץ יותר במכונות מיקום מתקדמים.
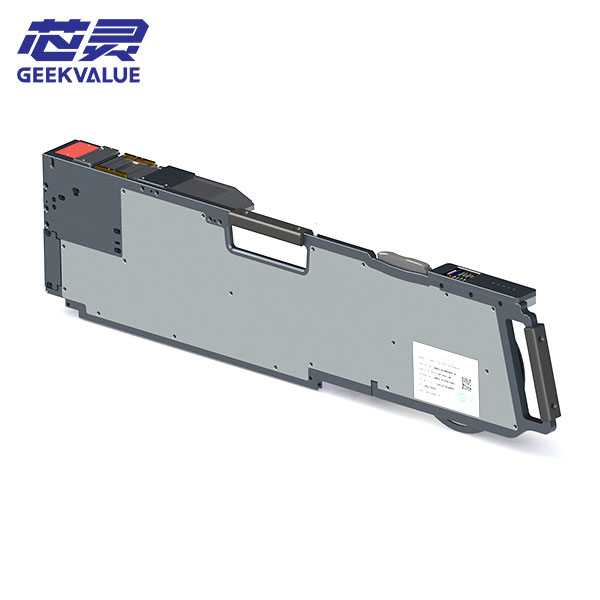
הפרמטרים הטכניים הם כדלקמן
דגם DK-AAD2208
מידות (אורך*רוחב*גובה, יחידה: מ"מ) 570*127*150 מ"מ
משקל 14 ק"ג
מתח עבודה DC 24V
זרם מקסימלי 3A
מהירות האכלה 2.5-3 s/Pcs
מצב נהיגה חשמלי טהור
לוח הפעלה מסך TFT צבעוני 0.96 אינץ', 80*160 פיקסלים
שגיאת הרמת חומר ±0.4 מ"מ
רוחב סרט ישים 63-90 מ"מ
")