Le principe de fonctionnement du chargeur horizontal SMT comprend principalement les étapes suivantes :
Chargement des composants : tout d'abord, les composants électroniques sont chargés dans le chargeur (feeder) selon un certain agencement. Cela implique généralement la fixation des composants sur la bande, qui est ensuite montée sur l'arbre du chargeur.
Connexion de l'équipement : Le chargeur est connecté à la machine de placement pour assurer la synchronisation de la transmission du signal et du mouvement mécanique.
Identification et positionnement des composants : le chargeur identifie le type, la taille, la direction des broches et d'autres informations du composant grâce à des capteurs internes ou des caméras. Ces informations sont cruciales pour un positionnement précis ultérieur.
Prélèvement de composants : la tête de placement se déplace vers la position spécifiée du chargeur selon les instructions du système de contrôle et récupère le composant. Pendant le processus de prélèvement, il est nécessaire de s'assurer que la direction de la broche et la position du composant sont exactes.
Placement des composants : après avoir récupéré le composant, la tête de placement se déplace vers la position spécifiée du PCB, place le composant sur le pad du PCB et s'assure que la broche du composant est alignée avec le pad.
Réinitialisation et cycle : après avoir terminé le placement d'un composant, le chargeur se réinitialise automatiquement à l'état initial et se prépare pour le prochain prélèvement de composant. L'ensemble du processus est exécuté sous la commande du système de contrôle jusqu'à ce que toutes les tâches de placement de composants soient terminées.
Mode de conduite et classification
Le dispositif d'alimentation peut être divisé en entraînement électrique, entraînement pneumatique et entraînement mécanique selon différents modes d'entraînement. Parmi eux, l'entraînement électrique présente de faibles vibrations, un faible bruit et une grande précision de contrôle, il est donc plus courant dans les machines de placement haut de gamme.
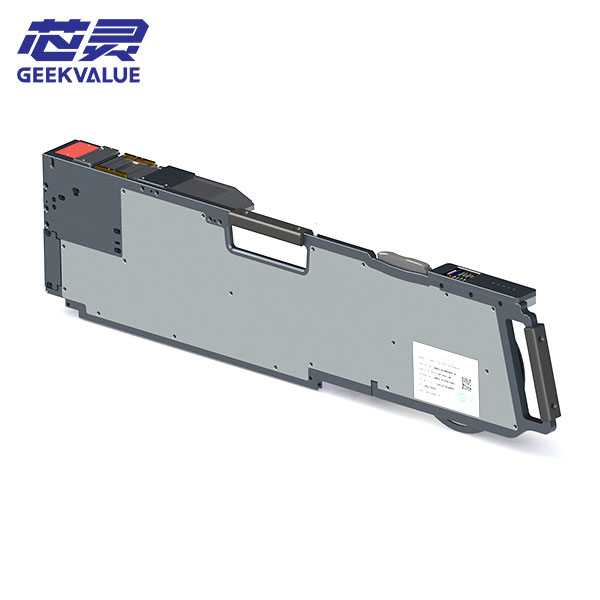
Les paramètres techniques sont les suivants
Modèle DK-AAD2208
Dimensions (longueur*largeur*hauteur, unité : mm) 570*127*150mm
Poids 14 kg
Tension de fonctionnement DC 24V
Courant maximal 3A
Vitesse d'alimentation 2,5-3 s/Pcs
Mode de conduite Pur électrique
Panneau de commande Écran couleur TFT de 0,96 pouce, 80*160 pixels
Erreur de levage du matériau ± 0,4 mm
Largeur de bande applicable 63-90MM
")